









 防磨防爆系列 水冷壁机器人
防磨防爆系列 水冷壁机器人
 A系列工业内窥镜
A系列工业内窥镜
 防磨防爆系列 管屏胀粗内窥镜
防磨防爆系列 管屏胀粗内窥镜
 工业内窥镜机器人 工业检测机器人
工业内窥镜机器人 工业检测机器人
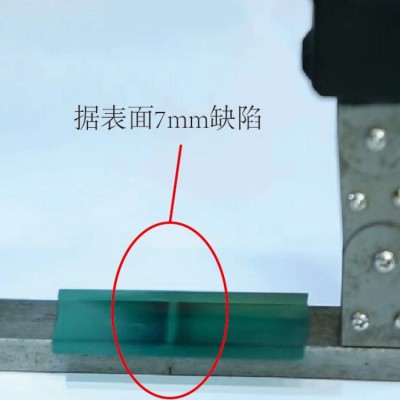
 防磨防爆系列 数字氧化皮检测仪
防磨防爆系列 数字氧化皮检测仪
 磁粉探伤仪系列 CCFS-II探伤仪
磁粉探伤仪系列 CCFS-II探伤仪
有线无人机
一、简介
锅炉具有空间密闭、内部结构复杂、环境恶劣等特点,各部件横竖不一,且部分空间极度狭小,检查环境细小灰尘弥漫,对无人机使用寿命、导航定位、自主避障及相机成像质量都是极大的挑战。
目前,大部分工业用无人机采用卫星或视觉导航进行定位,但锅炉的炉堂、尾部受热面等均为密闭空间且空间内光线较弱,存在较强电磁干扰,信号受屏蔽严重,卫星及视觉导航系统无法实现无人机的精准定位。本项目所选用无人机为四旋翼飞行器,飞控及图传系统均采用国内成熟、先进无人机技术,机械稳定性好;通过多个不同方向的激光传感器完成测距,实现锅炉内部相对位置的确定;机身外部增加圆形防护罩,以避免飞行中可能发生碰撞时无人机的损坏问题;结构相对简单,性价比高。
二、结构组成
智能巡检无人机由飞行平台系统、图像采集系统、有线供电系统和地面控制系统组成。
飞行平台系统主要包括动力系统、传感器、信号处理、GPS、照明、无线控制等。
图像采集系统主要包括云台、相机、传感器、无线传输等。
有线供电系统主要包括升压稳压系统、线缆等。
地面控制系统主要包括无线控制、GPS导航、计算机、手机等。
三、工作原理
无人机采用有线供电,并配备高亮度LED照明,通过遥控器操纵或者通过编程实现自主飞行,在锅炉内飞行到待检查位置悬停,利用搭载的4K高清图像采集摄像头,对锅炉内部拍摄,通过WIFI传输模块将实时图像无线传输至计算机或手机观看。以实现对炉膛内过热器、水冷壁等的快速检查。
四、特点
(1)供电系统:采用有线供电
目前市面上的无人机均采用电池供电,飞行时间在10min ~ 30 min 之间,飞行器续航时间短。对于空间很大的锅炉炉膛检查需要长时间、远距离作业任务,采用电池供电无法完成检查任务。
我司无人机采用地空电力传输,采用220V市电升压为高压的直流电通过线缆连接到智能巡检无人机供电,线缆长度可达到30米,可不间断的为无人机供电,解决了无人机电池供电时间短的问题。
(2)4K高清摄像模式
采用带有三轴自稳云台的4K前置摄像头和1080P的底置双镜头图像系统,可电动调节摄像头的方向和5倍变焦。实现对现场高清拍照和摄像,图像清晰。
(3)无人机在锅炉中悬停
采用GPS卫星导航和光流(视觉)导航两种模式。在锅炉无法接收GPS卫星信号,可切换到光流导航模式,利用高亮度LED照明导航到需要检查的位置,悬停在待检位置进行检查。
(4)无人机在锅炉中避障
采用激光雷达和防护罩形式实现双重避障,在离障碍物2米距离时无人机悬停实现自主避障功能;在一些需要近距离检查的场合,通过防护罩可防止与炉壁碰撞。
五、适用范围
① 炉膛水冷壁检查;② 屏过、末过不易搭设脚手架区域检查;③ 吹灰器枪头及其作用范围的壁面、防磨瓦、管壁吹损情况检查;④ 炉腔内部燃烧器检查;⑤ 其它有限空间或密闭空间检查。
六、技术参数
① 起飞重量 | 595g |
② 尺寸 | 折叠 180×97×77 mm(长×宽×高) |
展开 183 ×253×77 mm(长×宽×高) | |
③ 对角线轴距 | 302 mm |
④ 飞行高度 | 20m |
⑤ 最大上升速度 | 6m/s(运动档);6m/s(普通档) |
⑥ 最大下降速度 | 6 m/s(运动档) ;6 m/s(普通档) |
⑦ 最大水平飞行速度 | 19 m/s(运动档);15 m/s(普通档);5 m/s(平稳档) |
⑧ 最大抗风等级 | 5级风10.7m/s |
⑨ 最大可倾斜角度 | 35°(运动挡)前:30°,后:20°, 左、右:35°(普通挡) |
⑩ 最大旋转角速度 | 250°/s(运动挡); 90°/s(普通挡);60°/s (平稳挡) |
⑪ 工作环境温度 | 0℃至40℃ |
⑫ 工作频率 | 2.4 GHz 5.8 GHz |
⑬ 发射频率(EIRP) | 2.4 GHz:FCC:<30 dBm;CE:20 dBm SRRC:<20 dBm;MIC:<20 dBm |
5.8 GHz:FCC:<30 dBm; CE:<14 dBm;SRRC:<29 dBm |